
RosZ免费单机版部署及配置教程
- 其他
- 2022-12-01
- 7585热度
- 0评论
单机版服务端下载
请仔细阅读 RosZ云路由单机版 免责声明,并核对服务端SHA256指纹是否一致。
为保护您的设备安全,请勿使用来源不明的破解或修改版本。
请根据您的操作系统环境下载对应版本。
部署问题咨询,需求提交请加RosZ云路由QQ群:138568213
Linux_ARM64_Static版本为静态编译,可用于Docker部署。
-
文件名称:RosZ_Win_X86_64_Ver3.6991.zip
发布日期:2023-02-13 00:24:00
文件下载: 下载 x86_64 ver3.6991
SHA256指纹:138c6c38d6d2750da30a7e776ac83e0a3c7ce5fb0163957cd8c0fedb1ac53a8c
-
文件名称:RosZ_Mac_X86_64_darwin_Ver3.6991.zip
发布日期:2023-02-13 00:24:00
文件下载: 下载 mac_x86_64 ver3.6991
SHA256指纹:afd3df7624a3e16c596cc5ad522e6ff92a9bad83fc3a8e21433a3c6757d2cbcf
-
文件名称:RosZ_Mac_ARM64_darwin_Ver3.6991.zip
发布日期:2023-02-13 00:24:00
文件下载: 下载 mac_arm64 ver3.6991
SHA256指纹:5449ec66176d2180a66299472eb52c8746770cc70b7b2403eb143d1061dd8ddf
-
文件名称:RosZ_Linux_X86_64_linux_Ver3.6991.zip
发布日期:2023-02-13 00:24:00
文件下载: 下载 linux_x86_64 ver3.6991
SHA256指纹:fe53fec6280b79cf23818d3de0e81b48b564bd85851a2694a77aaf23de2e2cae
-
文件名称:RosZ_Linux_ARM64_Static_linux_Ver3.6991.zip
发布日期:2023-02-13 00:23:00
文件下载: 下载 linux_arm64_static ver3.6991
SHA256指纹:8b502831d7208bdefb42528456eed0045eecde22912b7b0090264605934e843f
-
文件名称:RosZ_Linux_ARM64_linux_Ver3.6991.zip
发布日期:2023-02-13 00:23:00
文件下载: 下载 linux_arm64 ver3.6991
SHA256指纹:9613d9f913d752a72ca48fbe4fd44bc02b0846006337961509244a543a122bfc
启动指令介绍
-d string
数据文件路径,默认为 ./RosZLog
-f string
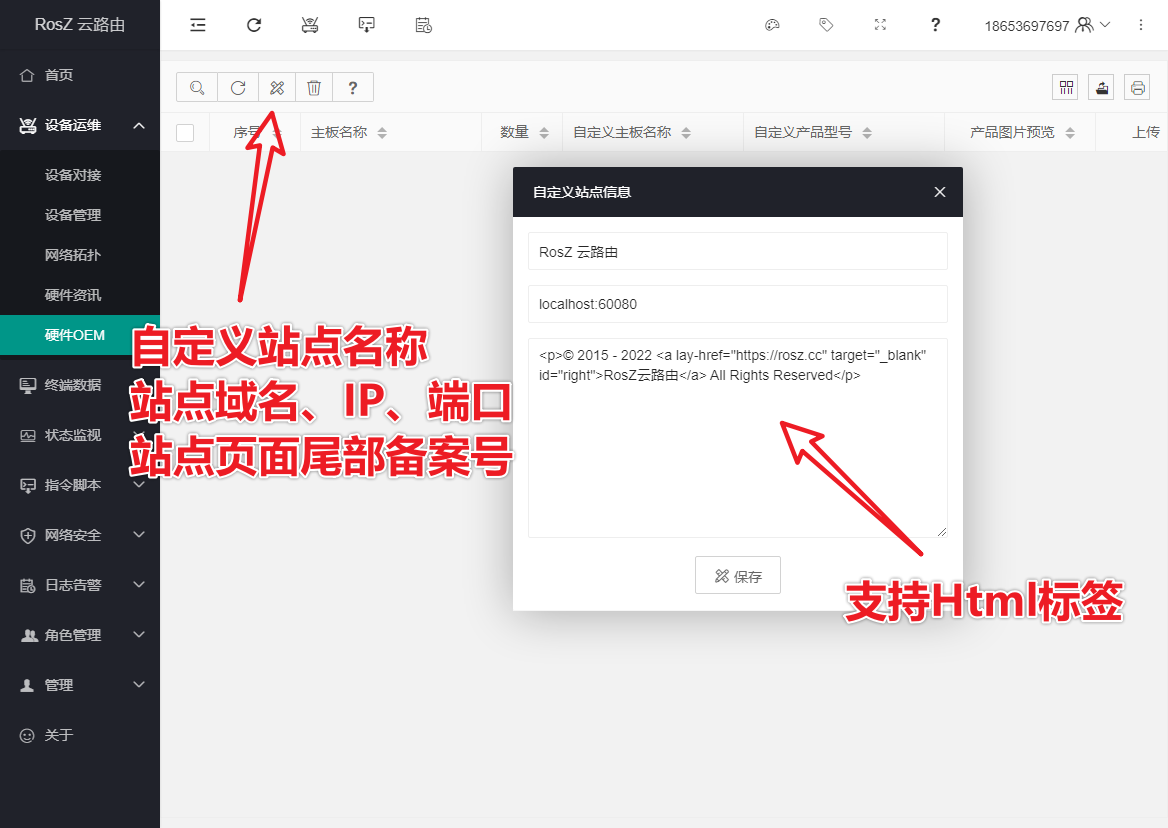
站点脚注,支持Html标记,请使用英文引号包裹参数内容
-h string
主机名,默认为 localhost
-l string
Udp日志接收端口,默认为 514
-n string
站点名称,默认为 "RosZ 云路由" (请使用英文引号包裹参数内容)
-p string
Http请求端口,默认为 60080
Windows环境部署(X86_64)
解压后,双击运行即可。
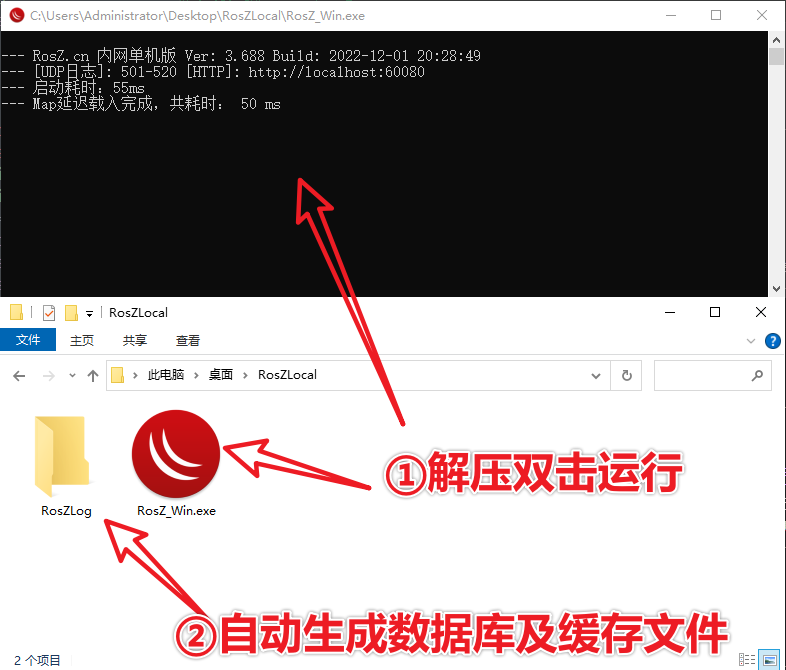
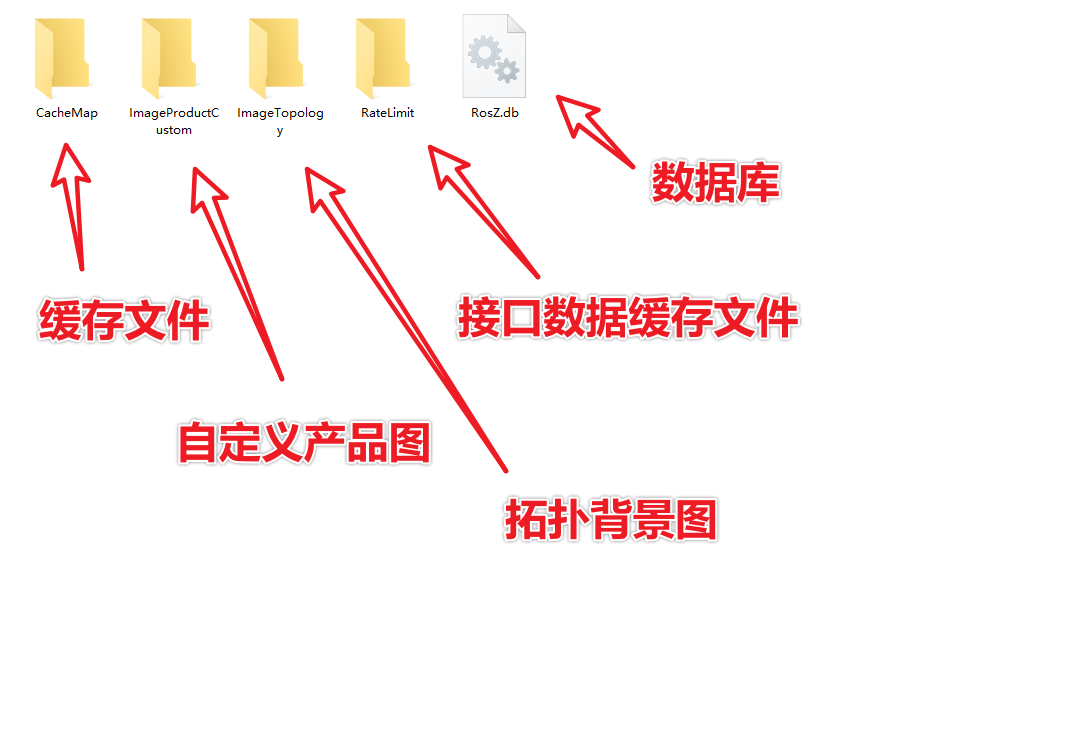
服务端正常运行后,自动生成数据文件,结构说明如图。
Linux环境部署(X86_64/ARM64)
RosZ服务端通过SSH或SFTP等传输方式拷贝至Linux服务器。
执行命令,增加程序的执行权限。
chmod +x RosZ_Linux启动服务端:
./RosZ_Linux如需后台运行,可使用nohup:
nohup ./RosZ_Linux &
如需作为服务运行,请参考其他网站教程。
Mac(X86_64/ARM64)环境部署
下载RosZ服务端后,双击运行,会提示软件来源不明,点击“好”,关闭。
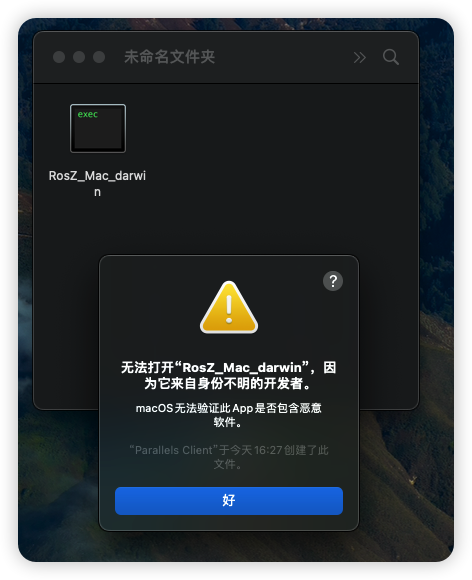
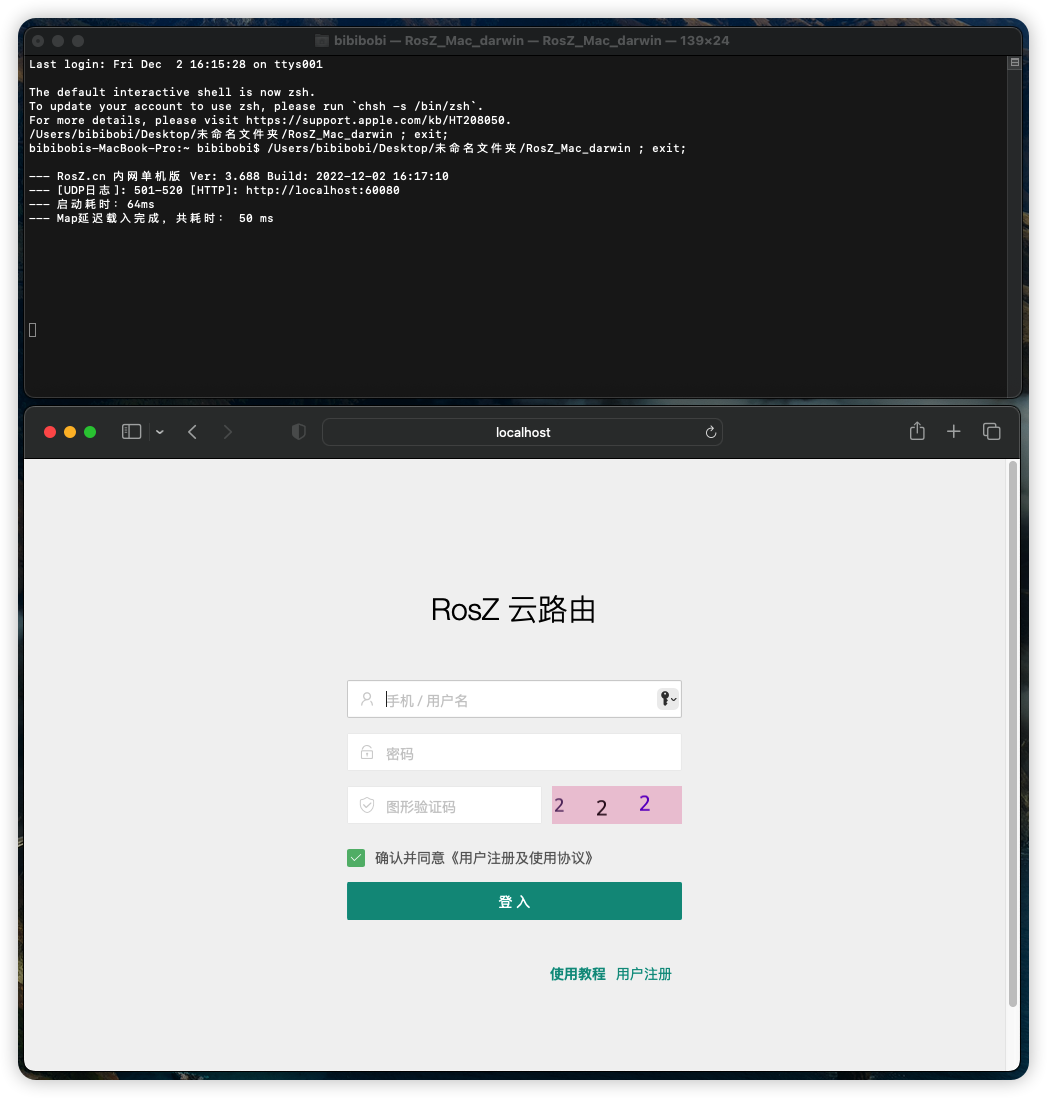
在系统设置-隐私与安全,点击已阻止RosZ服务端启动的提示,选择仍要打开。

再次双击服务端,运行正常。根据您的系统配置不同,RosZ服务端数据文件会创建到当前目录,或者用户目录下,文件结构与Windows一致。
基本配置及说明
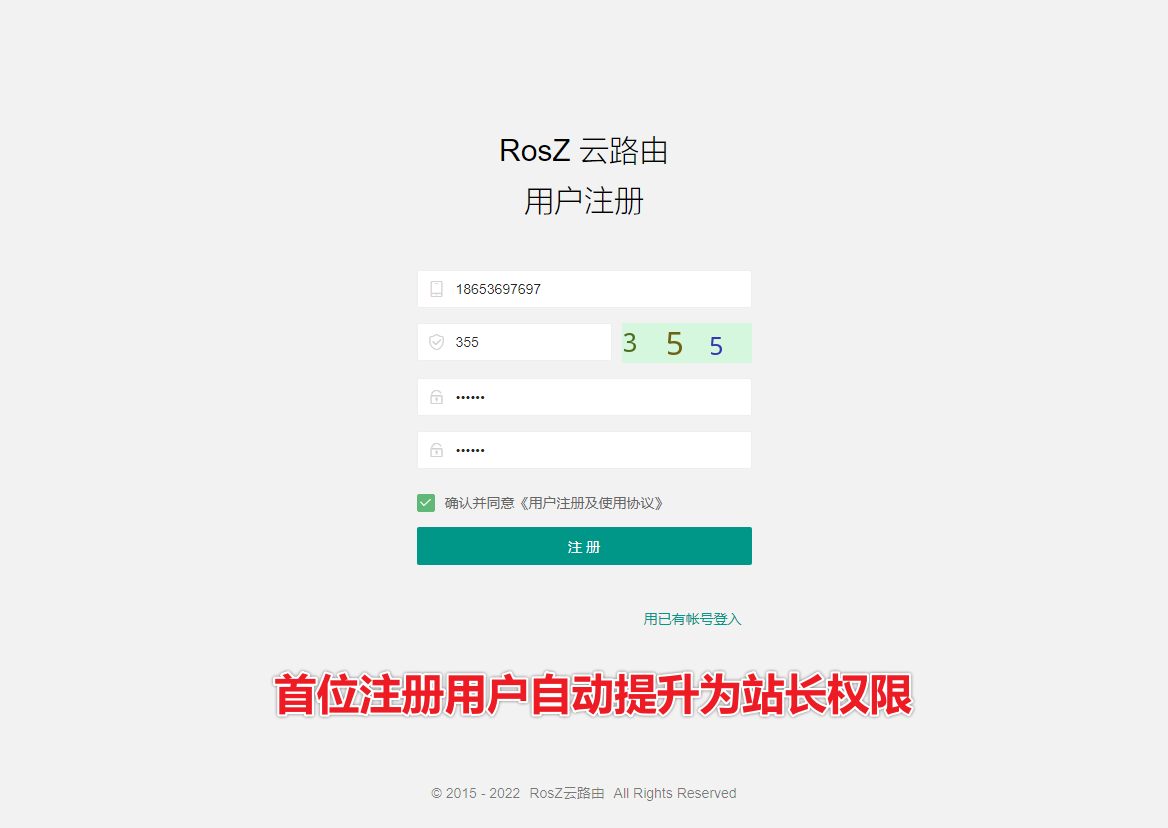
站长权限分配
首位注册用户自动提升为站长权限
自定义站点配置
支持自定义连接地址和端口,如需外部访问,请自行配置端口映射。
注意:日志接收使用udp 501-520端口,无法修改。
根据日志数量,一共20个日志接收端口,可以通过pcc实现负载均衡,或者仅使用某一个端口。


数据备份
数据库文件、数据缓存文件,均位于RosZLog文件夹下。各个平台下可以使用操作系统脚本或者计划任务定期备份,也可以通过Ftp、SFtp等传输方式进行远程备份。
常见问题
无法对接设备
1、请检查Windows、Linux、Mac系统的网络防火墙配置,默认使用60080的tcp端口对接,是否有配置放行;如果您修改了对接端口,请检查对应端口的防火墙放行策略。
2、检查Mikrotik设备是否可以ping通你的服务端IP地址。
3、检查配置的服务端IP和域名在设备上是否可以ping通,默认的localhost设备无法访问,需要修改为服务端的IP或者域名。
首页流量图和设备状态图无法显示
修改单机版站点域名后,需要使用对应域名访问,以便首页websocket动态数据传输正常建立连接,请检查访问站点是否使用了配置的域名。
如何迁移、更新RosZ单机版程序
所有数据都存储在RosZLog目录下,迁移只需要复制数据即可,更换不同平台的服务端程序就可以支持跨平台迁移,数据文件通用。
更新RosZ单机版服务端,只需要下载对应操作系统的新版服务端,覆盖并重新启动服务端即可。
关于“[sessions] ERROR! securecookie: the value is not valid”错误
RosZ单机版使用动态Session加密密钥,每次启动密钥都不同。由于服务端重启后,浏览器未关闭,仍保留之前的Session数据,所以会提示校验错误。
保留该错误提示的意义是,服务端启动24小时后,应该不再出现此类错误,如果频繁出现,请留意网站是否正在遭受侵入攻击。